![]()
![]()
![]()
![]()
|
|
|
|
|
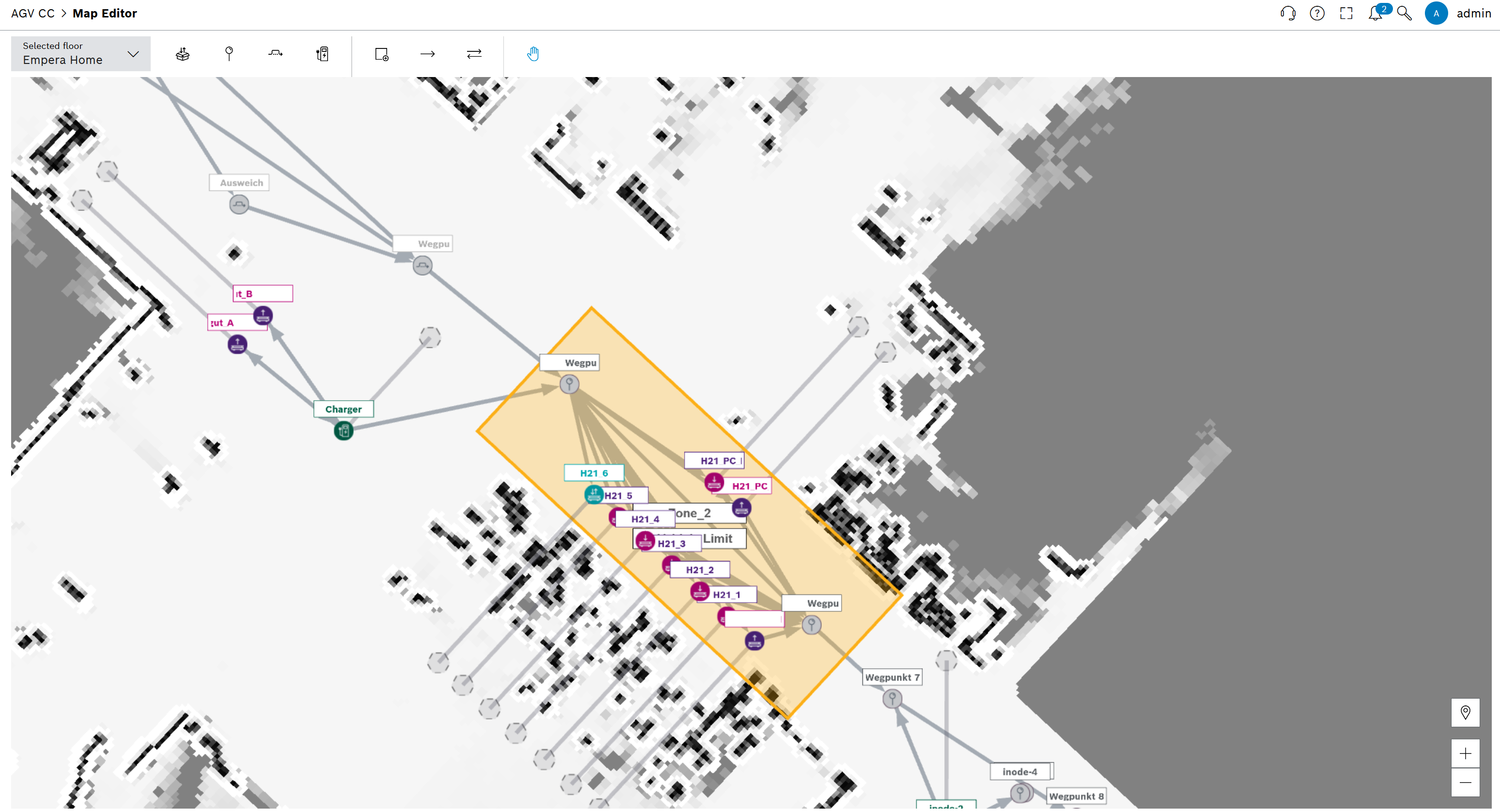
Waypoints, segments and zones can be created and configured in the AGV CC > Map Editor menu item. Changes are generally adopted by the vehicles with the next order.
Only areas that are not currently being approached should be processed.
Icon |
Function |
|
Drop-off/start creation mode: |
|
Waypoint creation mode: |
|
Bypass creation mode: |
|
Charging station creation mode: |
|
Zone creation mode: |
|
Create routes with normal waypoints and segments on the map. |
|
Create bi-directional routes with normal waypoints and segments on the map. |
|
Move map |
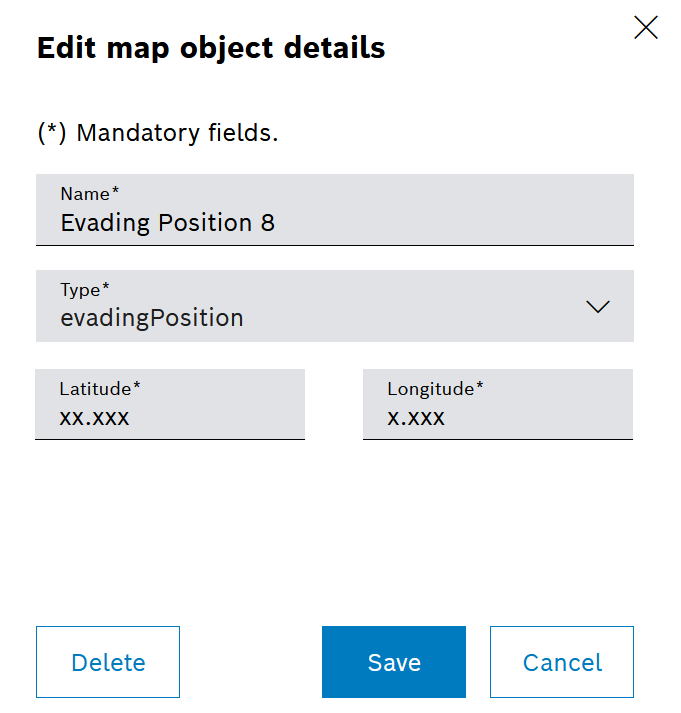
To edit or delete an element on the map, click on the element and change the settings or delete the element in the dialog window. Alternatively, right-click on an element and select an option.
The route network is required to assign an area of application to the vehicles and to enable the flow of traffic.
A route network can consist of different waypoints:
Prerequisite
Role AGV-CC 3rd-Level or SupportAGV-CC Admin or AGV-CC Planner
Procedure
The waypoints are only recognizable if the map has the correct resolution.
The waypoint appears.
The dialog window opens.
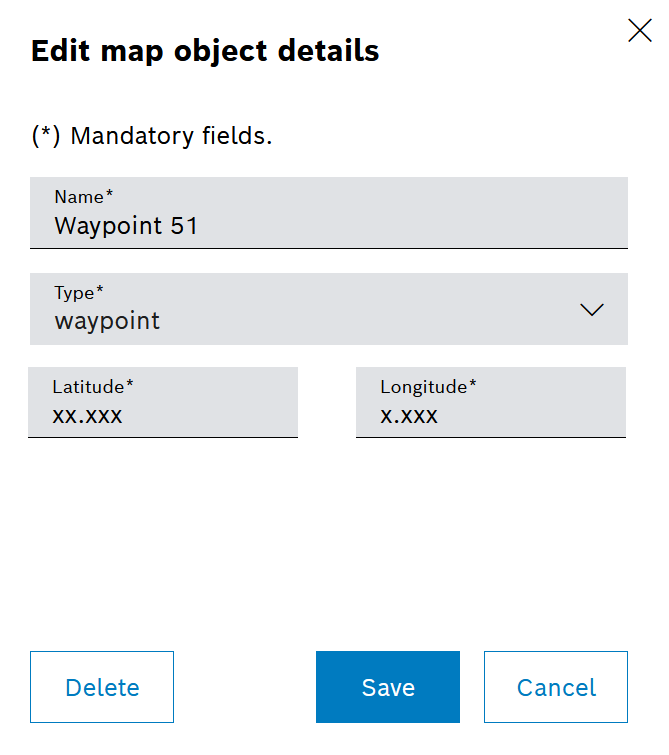
A normal waypoint is used to split up larger segments of the route or to guide vehicles past obstacles.
Icon on the map: ![]()
Drop-off and start waypoints are stations for delivering goods (drop-off waypoint) or for picking up goods (start waypoint). A drop-off/start waypoint is a station where goods can be both picked up and delivered.
Stations behave like normal waypoints, but have additional physical properties that are used by the vehicles for identification. Which identification feature is required by the vehicle depends on the respective vehicle type. A station can only be approached by a vehicle if the required features are present. A station with several features can be approached by several vehicle types.
Icons on the map: ![]() ,
, ![]() or
or ![]() .
.
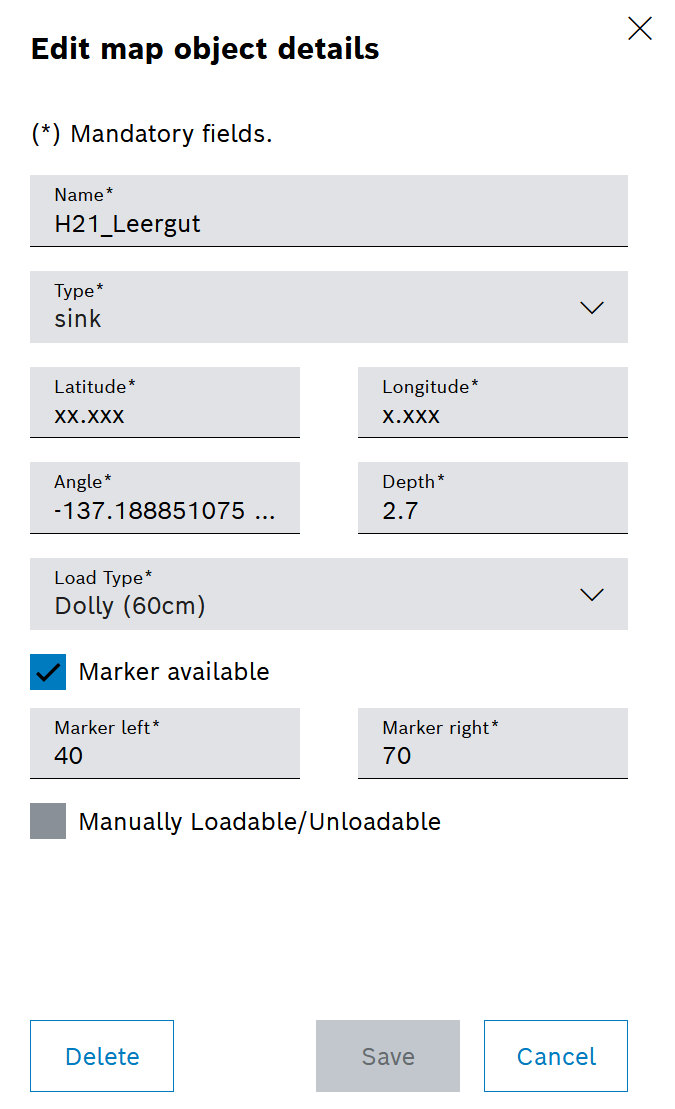
Angle and depth
The angle and depth are used to visualize how the station is aligned. This information is also used by vehicles to align themselves or to determine a maximum entry depth. Whether and how this information is used is available in the relevant vehicle type documentation.
Load type
The load type determines how the goods are transported, e.g. in a box or on a pallet. A station can only process one load type at a time. Vehicles that do not support the configured load type do not approach the station.
Marking
If the Marking present checkbox is activated, the station is marked with two DataMatrix labels, which are detected by the vehicles via a corresponding camera and used for precise positioning. A vehicle searches for the defined values in the two fields Marking on right and Marking on left.
Manual loading and unloading
The station has no additional features. A vehicle drives to the specified position and waits until the goods are loaded or unloaded manually on site.
A charging station waypoint is a station for charging a vehicle's battery. A charging station waypoint behaves like normal waypoints, but has additional physical properties that are used by the vehicles for identification.
Icon on the map: ![]() .
.
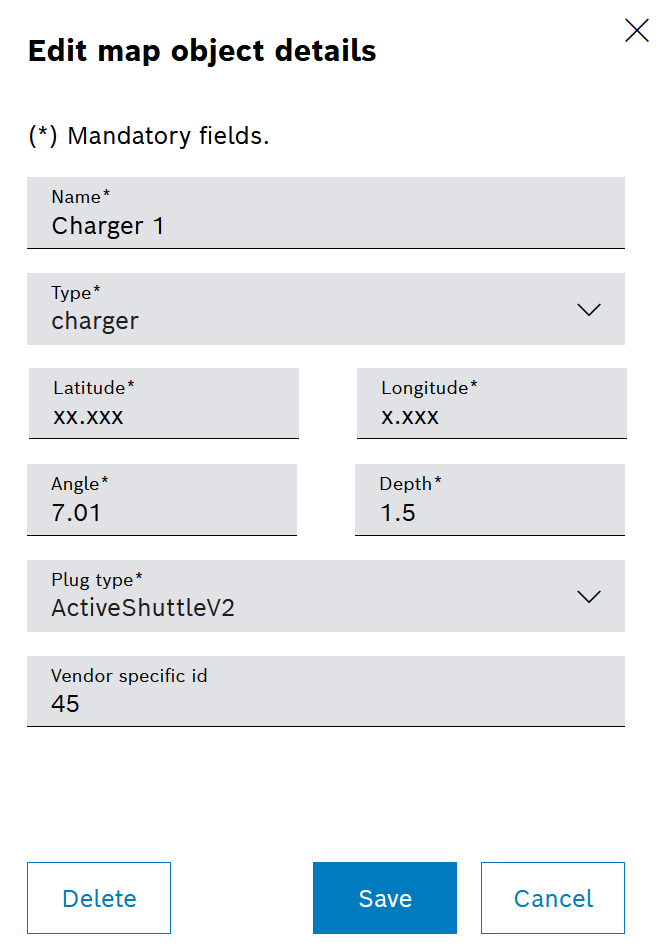
Angle and depth
The angle and depth are used to visualize how the station is aligned. This information is also used by vehicles to align themselves or to determine a maximum entry depth. Whether and how this information is used is available in the relevant vehicle type documentation.
Connection type
The connection type determines which connection type the charging station offers. Vehicles use this type to select the appropriate charging station.
Manufacturer-specific ID
The manufacturer-specific ID provides the option of giving the vehicle a value that is required for the docking process.
A bypass waypoint is a position for short-term parking of an AGV so that a milk run can pass. An avoidance position behaves like a normal waypoint: Normal waypoint.
Icon on the map: ![]()
A zone offers the option of combining several waypoints and managing them together.
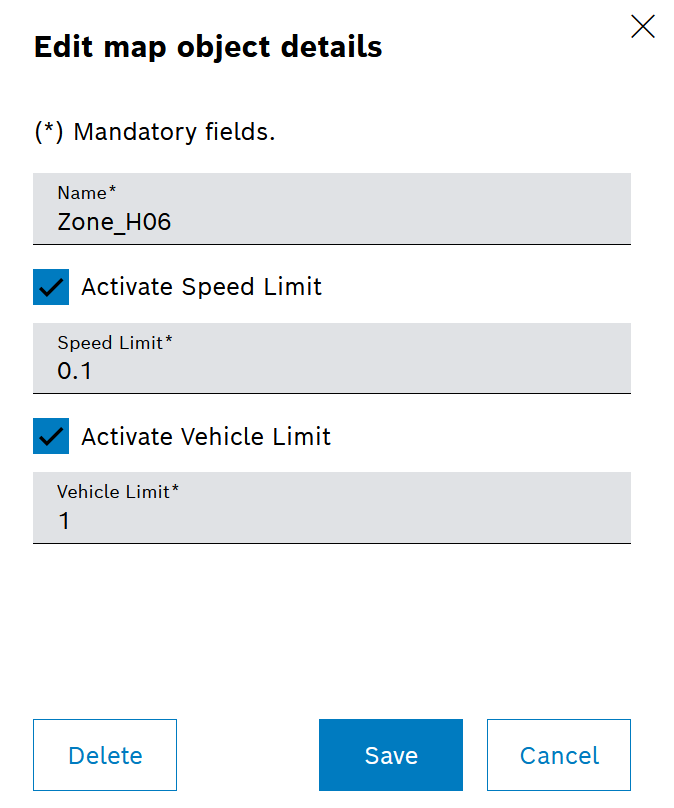
Velocity limit
Within the zone, vehicles must adhere to the defined maximum speed. The speed limit is transmitted to the vehicle via the segments (VDA5050). Therefore, either the source or the destination of a segment must be in the zone.
It is the responsibility of the vehicles to comply with the maximum speed. The AGV Control Center module cannot enforce this. Vehicles can ignore the specifications.
Limitation of the number of vehicles
Only the configured number of vehicles may be within the zone at any one time. This is ensured by waypoints entering the zone. Vehicles that want to enter the zone are stopped at the last waypoint outside the zone if necessary. If the limit on the number of vehicles is activated, this is displayed on the map: ![]() Vehicle Limit.
Vehicle Limit.
Vehicles that drive through a zone independently are not taken into account.